CITAZIONE (alesspm @ 26/7/2022, 14:28)
...tornando per un momento alle molle, vorrei solo precisare che non mi azzardavo a pensare che ci si potesse realizzare una trasmissione più efficiente di quelle a catena! (Che so essere pressoché imbattibile, tanto più nel caso dello scatto fisso). Mi chiedevo piuttosto se lo svantaggio in termini di efficienza fosse necessariamente così ampio da non poter essere in alcun modo compensato dai vantaggi che immaginavo. Insomma; l'efficienza di una trasmissione a molla del tipo descritto sarebbe più vicina al 10% o all'80% ?!
Fosse anche vicina all'80%, mi chiedo che vantaggio avrebbe se poi si butta via il 20%

Normalmente si cerca di avere mezzi efficienti ... a meno che non si tratti di una attrezzatura da palestra dove quello che conta è faticare

Quasi sicuramente il tutto peserebbe di più ... che non è esattamente "efficienza" in senso lato, ma che comunque sarebbe una massa maggiore che richiederebbe di essere portata a spasso.
Comunque ben vengano "idee nuove", perché, indipendentemente da essere valide, avviano dei confronti da cui qualche volta potrebbe saltare fuori qualcosa di interessante ... o, quantomeno, portare ad approfondimenti curiosi come quelli legati ai brevetti. Esiste un approccio che si basa proprio sull'osservazione degli abstract dei brevetti, arrivando a sostenere che "tutto è stato inventato e brevettato" ... per cui basterebbero delle opportune ricerche all'interno dei brevetti per trovare la soluzione al problema od almeno degli spunti interessanti (
TRIZ).
Google Patent può essere utile ... anche se le "parole chiave" non sempre sono facili da azzeccare per trovare quello che si ricerca ...
********************************
Nota sull'efficienza: la "sola molla" ha un'efficienza elevatissima (e non scalda ... e dura all'infinito se ben dimensionata), si perde nel meccanismo che fa "entrare" ed "uscire" l'energia nella molla!
All'inizio della mia carriera professionale (era il 1986

) mi ero occupato di definire e confrontare in modo oggettivo le "prestazioni" di riduttori per robotica industriale.
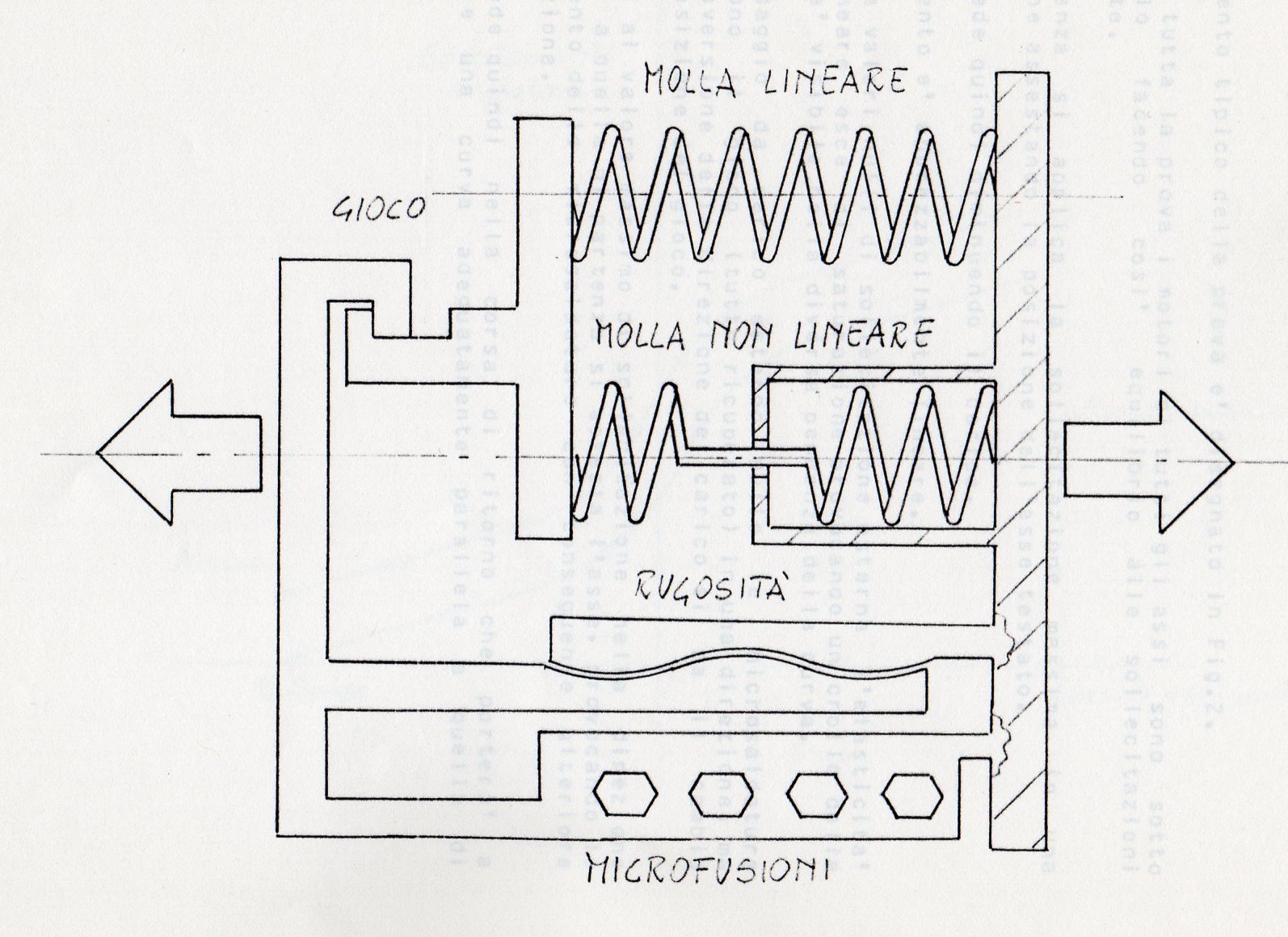
Ebbene, ogni asse di un robot industriale è alla fine dei conti un sistema elastico, ma la costante elastica (che in questi riduttori sovente non è costante) non è l'unica caratteristica importante. Ci sono altri parametri come:
- gioco
- attriti di vario genere
- viscosità
- comportamenti "particolari" in rotazione (leggi risonanze a determinate velocità di rotazione) ... che in questo caso non interessano ...
Visivamente il sistema può essere rappresentato come da immagine seguente:
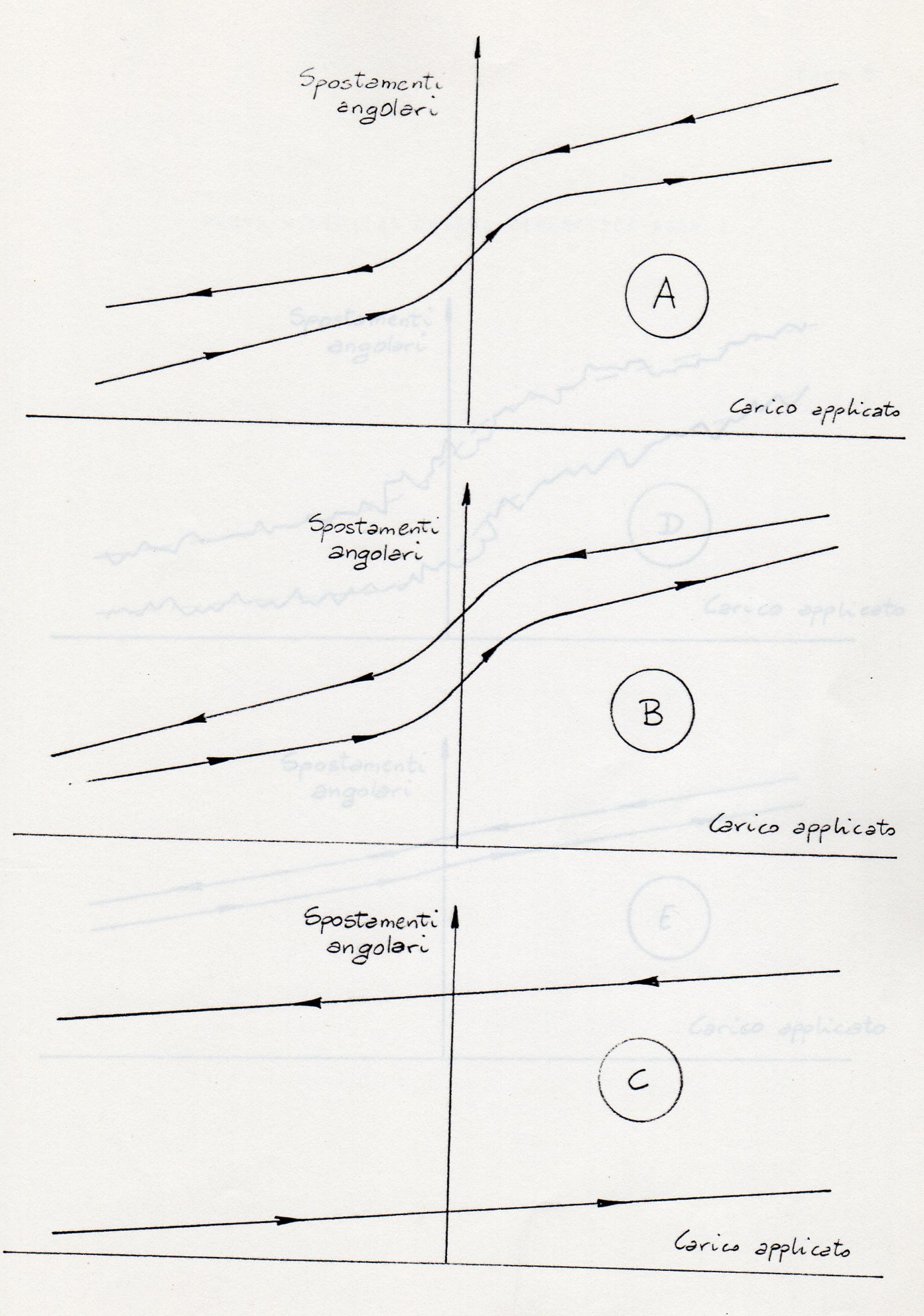
Ora, facendo fare un ciclo di isteresi al sistema elastico si potevano ottenere grafici "interessanti" (ciclo di isteresi: caricare il sistema elastico in una direzione e poi diminuire il carico a step successivi, annotando il cedimento e poi caricare nella direzione opposta a pari valore ed infine "tornare al punto di partenza"):
-
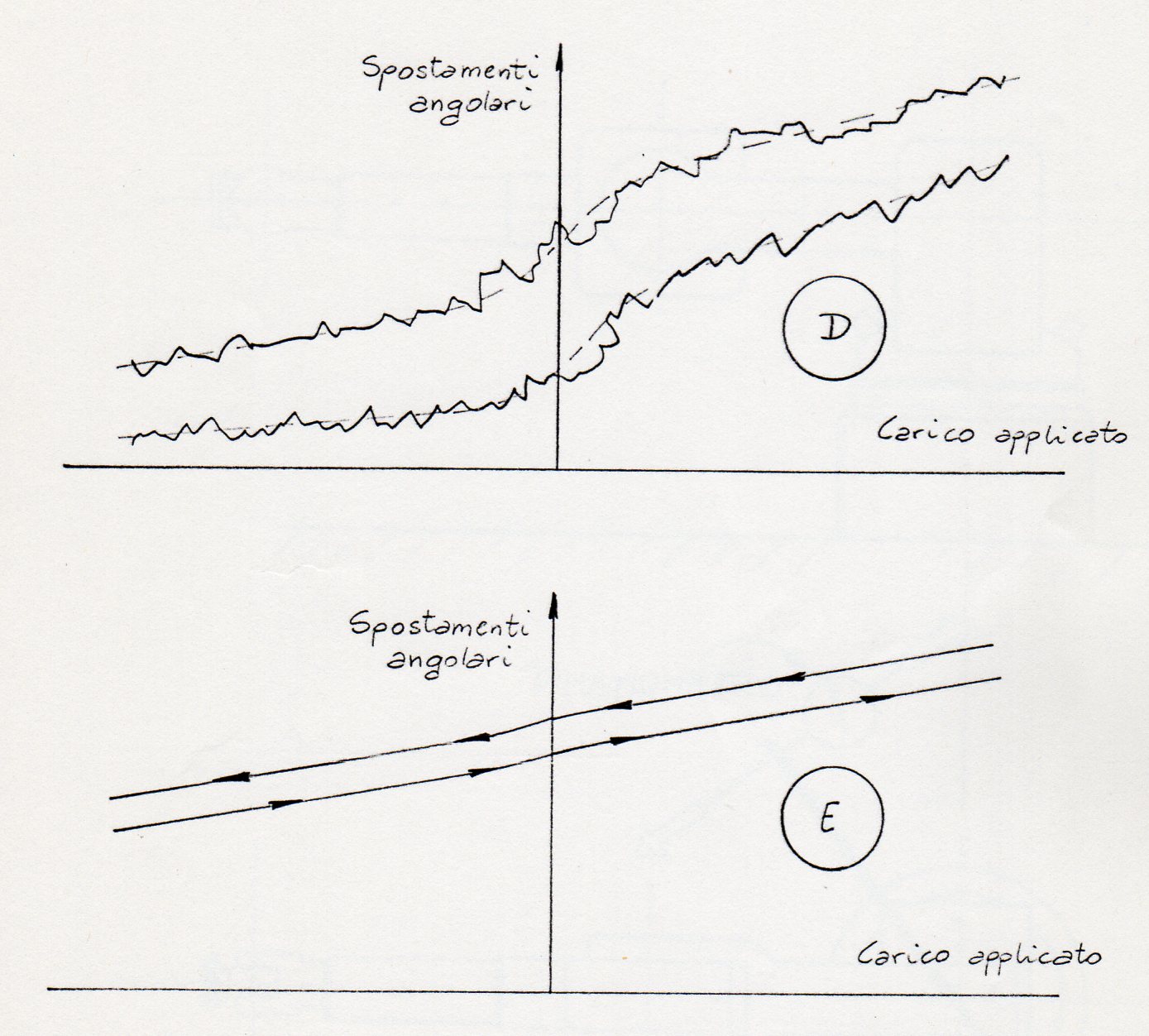
La cui interpretazione è di seguito riportata:
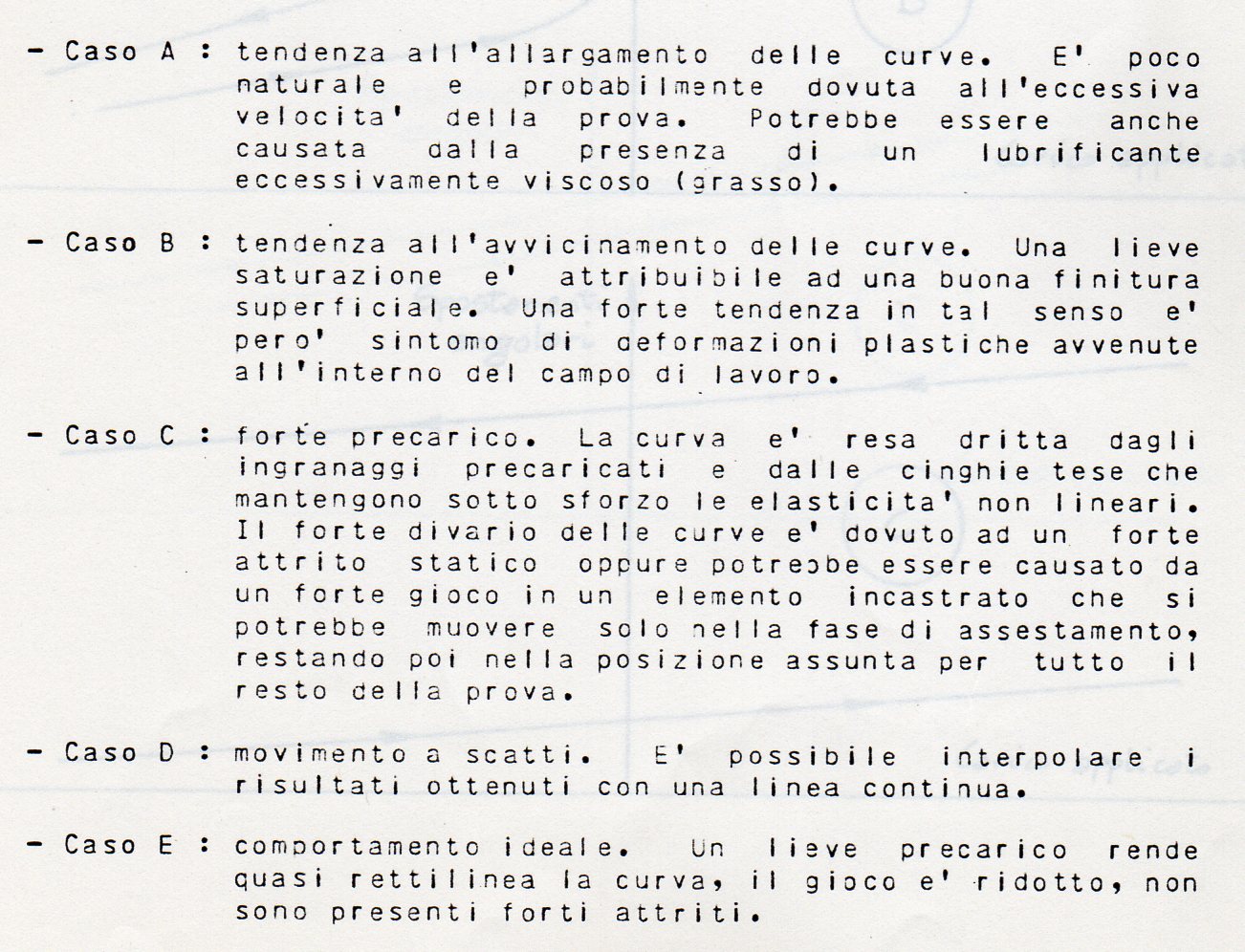
Che tenerezza questo documento "ante-Windows"


Scusate l'amarcord ... ma era pertinente










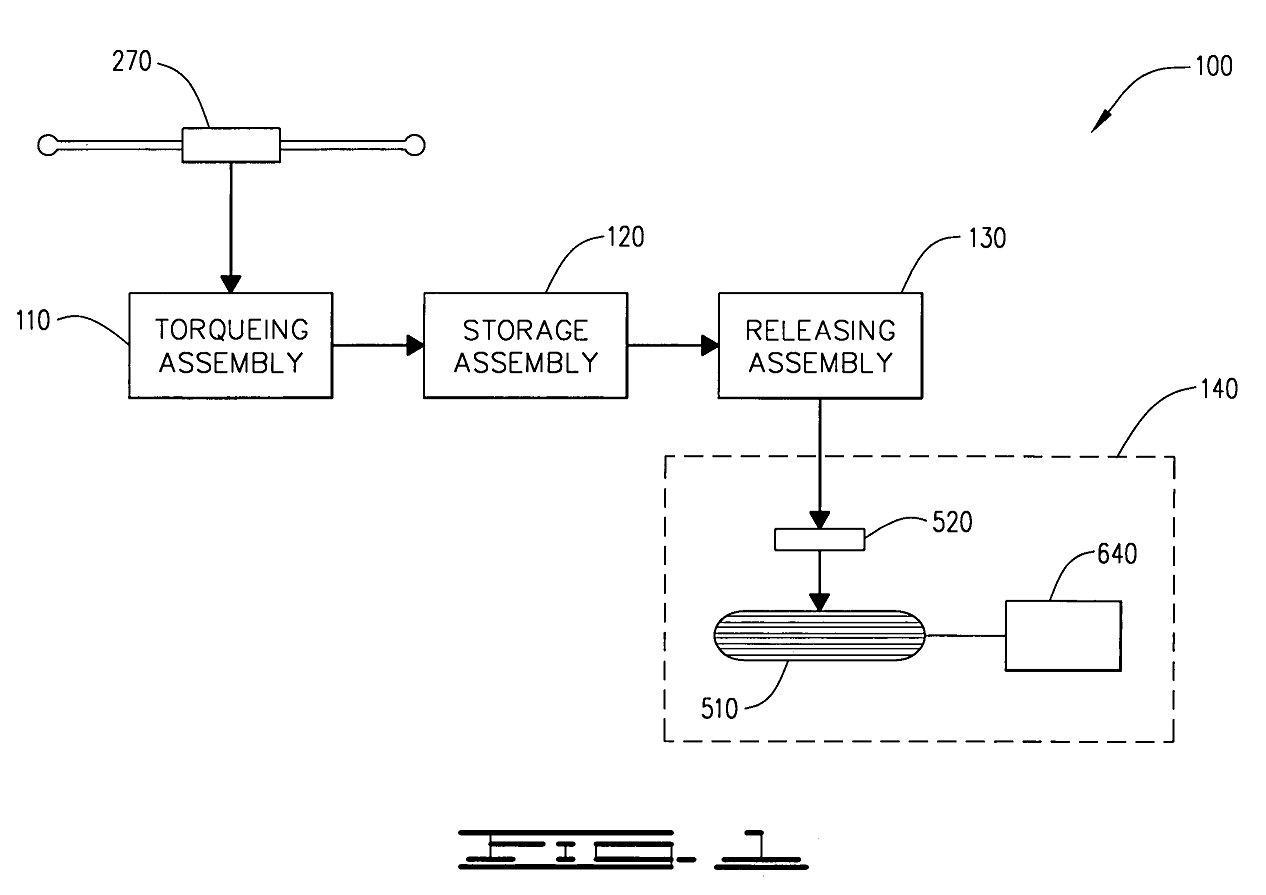
 la modalità di funzionamento di un sistema basato sull'accumulo di energia in una o più molle
la modalità di funzionamento di un sistema basato sull'accumulo di energia in una o più molle