In effetti, se si puntasse ad un e-trike super-compatto, le ruote "piccole" potrebbero essere interessanti perché esistono molte soluzioni commerciali e non particolarmente costose di ruote con motore integrato.
In uno degli ultimi "colpi di coda" della mia carriera professionale avevo guidato lo studio di un mezzo autonomo a basso costo; nei proof-of-concept scaturiti dagli studi di fattibilità avevamo utilizzato in prima battuta ruote da skate-board con motore integrato (diametro assolutamente troppo piccolo per quello che tu vorresti realizzare) per poi passare a ruote utilizzate su hover-board o carrozzine ... scoprendo un mondo sconosciuto, ricco di tantissime soluzioni.
Un limite da verificare per l'utilizzo di questa componentistica non sarebbe tanto il diametro, quanto le velocità raggiungibili ... ma ti suggerisco di provare ad approfondire in questa direzione ;-)
Se l'apporto della pedalata fosse "secondario", si potrebbe addirittura pensare di sterzare per effetto differenziale della rotazione delle 2 ruote posteriori motorizzate ... ottenendo raggi di sterzata ridicoli.
Sarebbe una sorta di hover-board con una terza ruota che si farebbe principalmente carico dell'equilibrio.
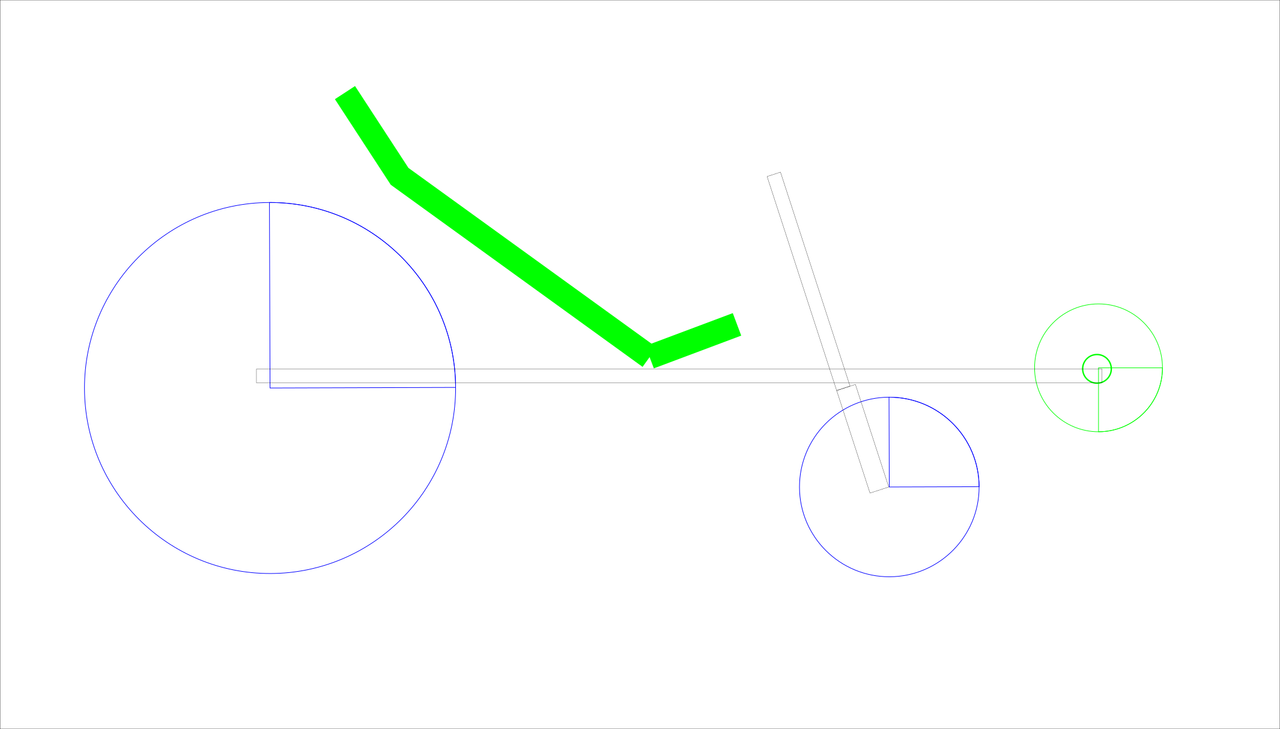
Potrebbe essere un trike FWD-MBB-TD con le 2 ruote posteriori motorizzate in modo indipendente, in grado di contribuire anche allo sterzo